Después de la sesión del Taller de Talento Matemático de Aragón, el día 4 de marzo de 2025 ha comenzado la exposición de los Mecanimos articulados y Matemáticas
en el IES Alonso Quijano de Alcalá de Henares.
Diseño: Miguel Cardil
Para celebrar el Día Internacional de las Matemáticas, el 14 de marzo de 2025 se realizarán dos charlas sobre la exposición, a las
9:00 y a las 10:00.
La sesión del
Taller de Talento Matemático de Aragón, se realizó el 28 de febrero de 2025 en el Edificio
de Matemáticas de la Universidad de Zaragoza, Campus Plaza de San Francisco.
En la charla hablamos de unos mecanismos sencillos y su relación con las Matemáticas.
1.- Introducción
Los mecanismos están formados por muy diferentes elementos como barras articuladas, poleas, engranajes, tornillos, levas, muelles, etc.
En esta charla nos centraremos en mecanismos articulados sencillos, en particular, mecanismos formados por barras conectadas de modo
que puedan girar, por ejemplo, por medio de tornillos. También veremos algún ejemplo de barras que se deslizan por guías.
Estos mecanismos articulados tienen muchos usos tanto en máquinas complejas como en mecanismos que podemos tener en casa o
ver por la calle.
Desde luego, son de especial interés para Ingenieros y Tecnólogos pero también son interesantes para Matemáticos y Físicos.
El material de la charla está formado por paneles en los que se han usado materiales sencillos como palitos de madera conectados
por uniones realizadas con impresión 3D. Algunos modelos están motorizados y otros están controlados por Arduino.
Es un proyecto multidisciplinar.
Lo que sigue es un esquema de las ideas principales.
2.- Mecanismos en casa y en la calle
Si nos fijamos en objetos domésticos podemos encontrar muchos mecanismos articulados.
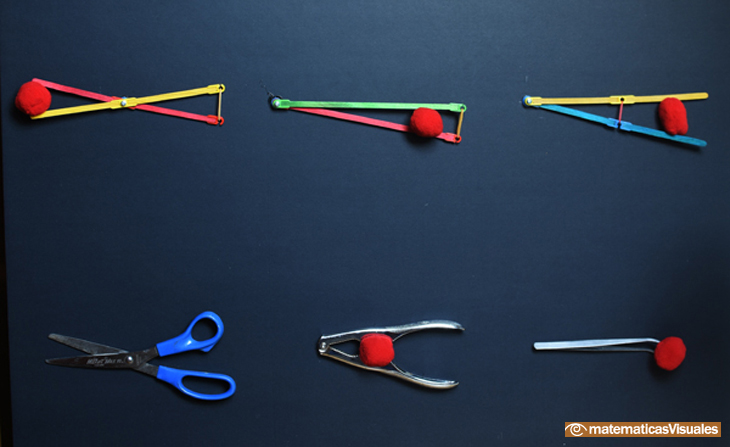
El más sencillo y fundamental es la palanca (Arquímedes). Tres tipos: primer, segundo y tercer grado (o género).
Podemos encontrar ejemplos de estos tres géneros en casa: tijeras (alicates, tenazas, etc.), cascanueces y pinzas.
¿Qué ejemplos se te ocurren de otros mecanismos articulados que podemos encontrar en casa?
En algunos casos las barras articuladas son evidentes pero en otros no. Pensemos en una silla plegable o en una escalera plegable.
Si la miramos "de perfil" vemos que son mecanismos articulados. A veces, una barra se desplaza por una guía.
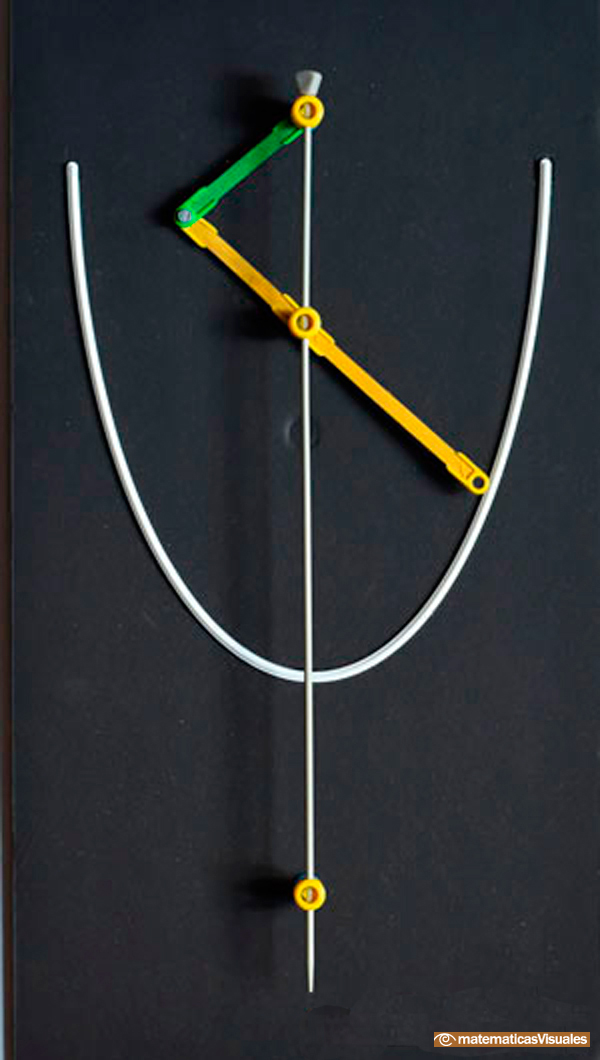
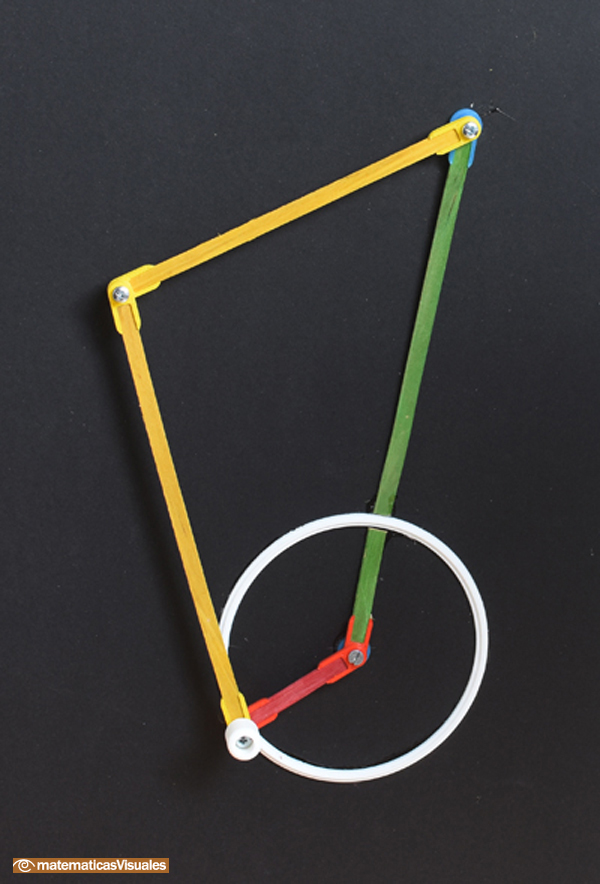
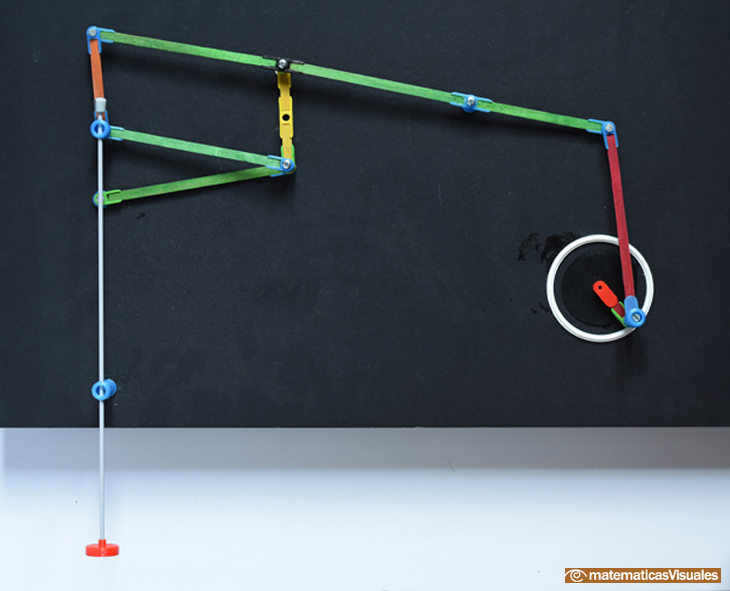
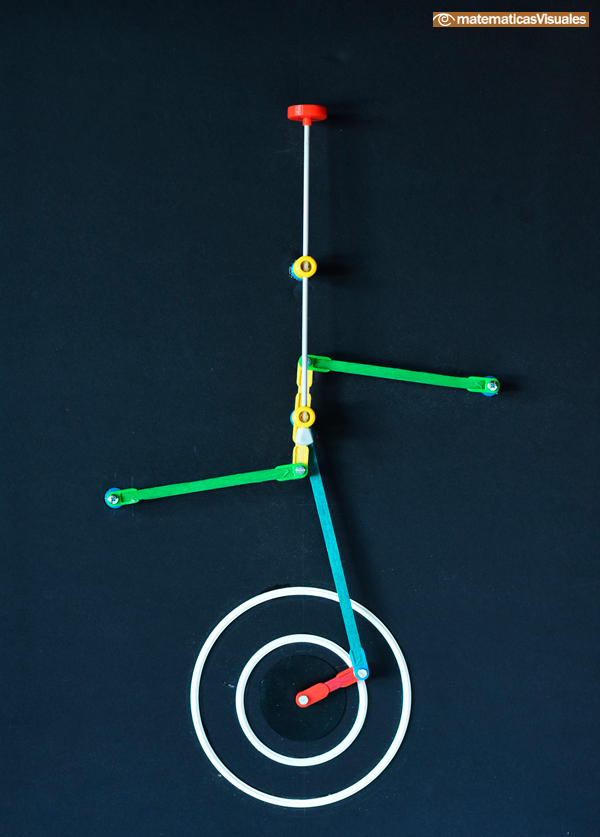
El siguiente modelo es un ejemplo que se encuentra en la fachada de mi casa. ¿Qué puede ser?
Vamos a destacar aquí que cuando movemos la maneta amarilla que se desplaza por una guía,
el extremo de la barra larga describe una trayectoria, una curva. Esa curva es una elipse.
Podemos pensar que a cada posición (punto) del extremo de la barra larga (sobre la elipse), le corresponde una posición (un punto) del
pivote que se desplaza por la barra vertical. Podría ser un ejemplo de un concepto matemático muy importante: FUNCIÓN.
Si nos fijamos por la calle encontraremos muchos mecanismos articulados. Pensemos en un vehículo cualquiera, un coche, por ejemplo.
Los limpiaparabrisas, la dirección y la suspensión están controlados por mecanismos articulados. En el interior del motor, los pistones
son impulsados en un movimiento rectilíneo por la explosión del combustible y
ese movimiento se transforma en un movimiento circular que moverá las ruedas.
Esta transformación del movimiento rectilíneo en circular es conocido desde tiempos muy antiguos.
Lo llamamos mecanismo de biela-manivela. Es habitual que un coche tenga cuatro pistones, cuatro bielas y las cuatro manivelas estén en una pieza que llamamos cigüeñal.
Volveremos a esta transformación del movimiento rectilíneo en circular (o viceversa) más adelante pues es un ejemplo muy bueno de la relación entre
Tecnología y Matemáticas.
2.- Mecanismos articulados de 4 barras
Mecanismos especialmente sencillos están formados por 4 barras articuladas.
Es habitual considerar que una de ellas está fija. En sus dos extremos están conectadas dos barras que pueden girar.
Una cuarta barra une los extremos de estas dos barras.
Un ejemplo es el siguiente:
¿Qué puede estar reflejando este modelo?. Una pista: muchos animales, en particular los humanos, tienen extremidades que se pueden
modelar como barras articuladas (Biomecánica).
En este caso, una de las barras puede girar completamente (recibe el nombre de manivela) mientras que la otra describe un arco.
Podríamos pensar que a cada ángulo de giro de la manivela le corresponde una posición del estremo de la otra barra.
En algunos casos ambas barras pueden girar una circunferencia completa,
en otros ambas están restringidas a describir arcos (Ley de Grashof).
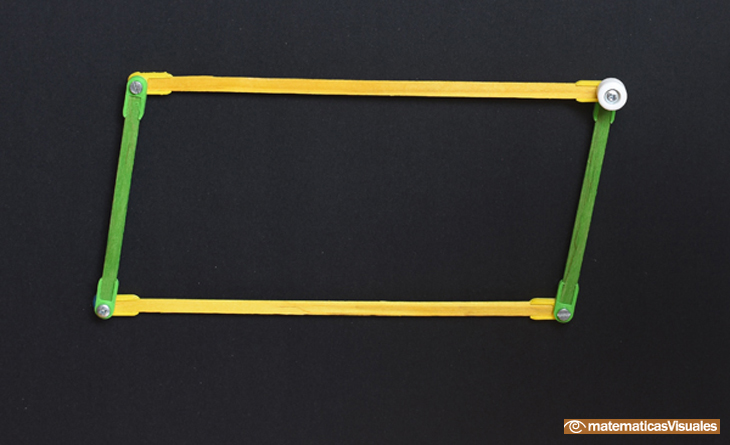
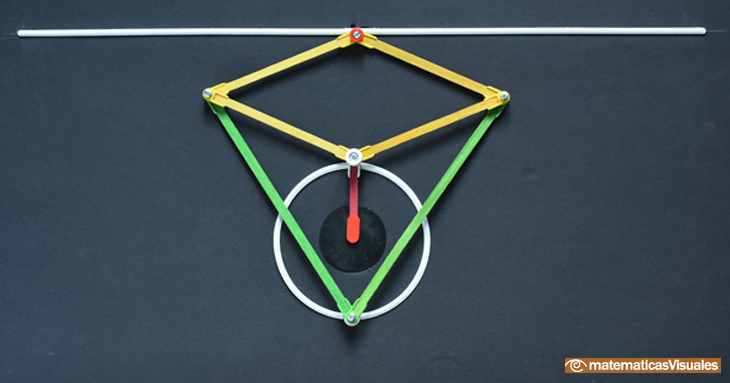
4.- El paralelogramo
Un caso particular de mecanismo de 4 barras es cuando las cuatro barras son iguales en longitud dos a dos, formando un paralelogramo.
En este caso, una barra puede girar una circunferncia completa y la barra paralela también.
Notamos que los ángulos que forman las barras son también iguales dos a dos.
El hecho de que las barras sean paralelas dos a dos se usa en muchos mecanismos.
Por ejemplo, en una balanza:
Una variante de este tipo de mecanismos es la base de una herramienta de dibujo que se llama pantógrafo.
Sirve para copiar dibujos cambiando la escala, aumentándola o disminuyéndola.
El pantógrafo tiene un punto fijo, un punto con el seguimos el dibujo y otro punto que reproduce la imagen.
Esta transformación se llama homotecia y es un caso particular de semejanza.
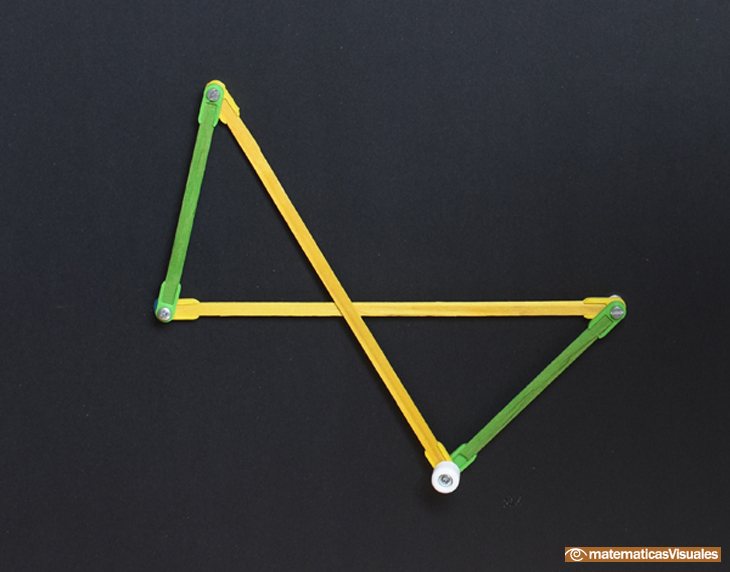
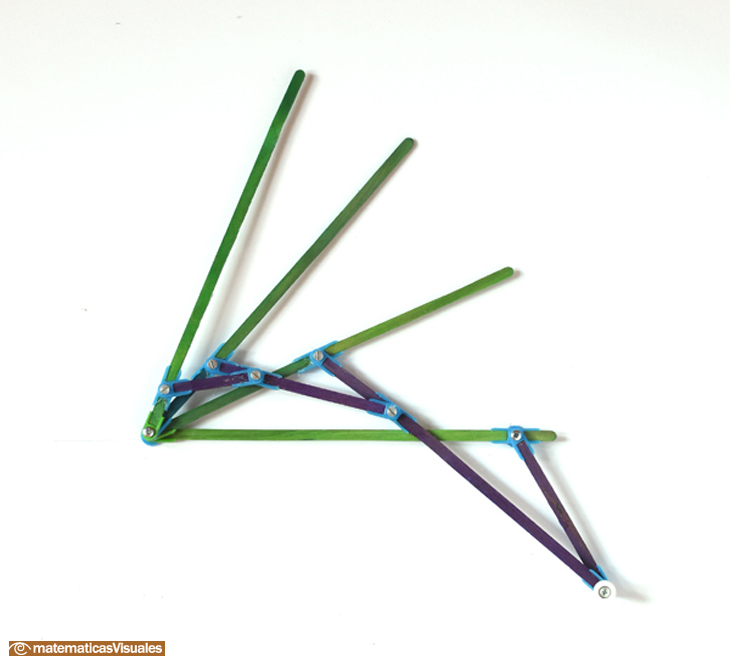
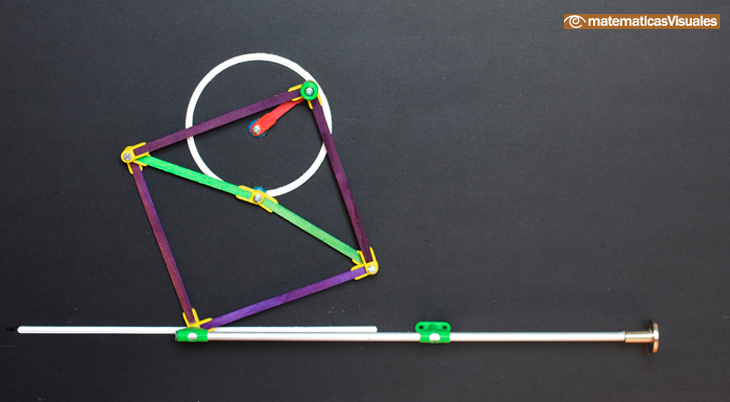
5.- El antiparalelogramo
Si cruzamos dos lados del paralelogramo obtenemos un antiparalelogramo
Un antiparalelogramo también tiene los ángulos iguales dos a dos.
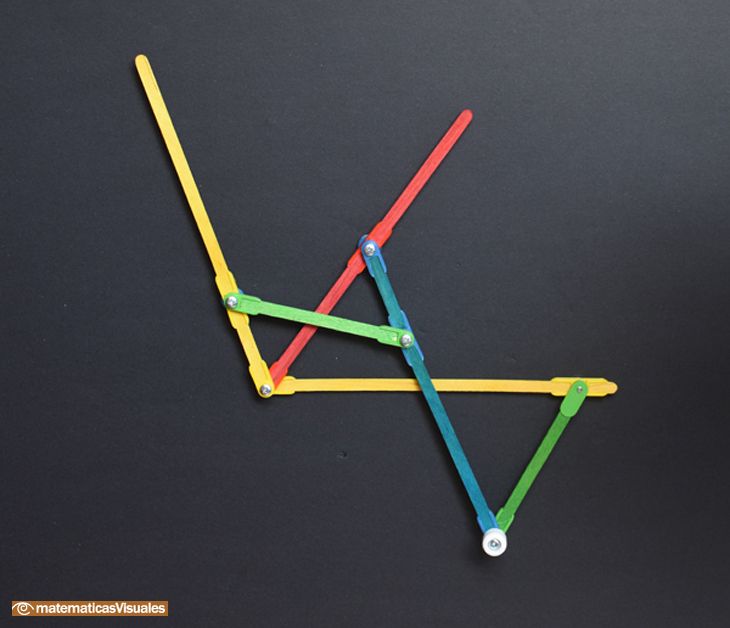
Si ponemos otro antiparalelogramo semejante al primero como el figura, el mecanismo divide el ángulo por la mitad (bisectriz).
Podemos colocar un tercer antiparalelogramos semejante y entonces estamos dividiendo el ángulo en tres partes iguales (trisectrices).
Trisecar un ángulo no se puede realizar con regla y compás.
Este mecanismo está descrito en el libro de A. B. Kempe (ver bibliografía al final).
6.- Movimiento circular y rectilíneo(I). James Watt
Un hito en el proceso que llamamos Revolución Industrial fue el desarrollo de la máquina de vapor.
James Watt hizo contribuciones tan importantes que decimos que Watt inventó esta máquina.
La máquina de vapor transforma el movimiento rectilíneo del pistón o embolo en un movimiento circular o rotatorio que es el que
se utilizará para mover máquinas o vehículos. Esencialmente es un mecanismo que llamamos de biela-manivela.
De los muchos problemas que tuvo que resolver, con ideas muy ingeniosas, estaba especialmente orgulloso del mecanismo que había
inventado para guiar la barra que está unida al pistón. Esa barra tiene que hacer un movimiento rectilíneo pues si no lo hace
se desgasta y estropea el émbolo.
Actualmente, este problema se resuelve con facilidad simplemente guiando la barra.
Un ejemplo actual interesante es el motor de explosión. En un motor de explosión, el pistón está movido por la fuerza de la explosión
del combustible no por vapor. También se necesita transformar este movimiento en circular (biela, cigüeñal). El pistón está guiado
por el bloque del motor y necesitamos aceites especiales para lubricar el motor.
Pero en tiempos de Watt los procesos de mecanizado
no estaban tan perfeccionados ni tampoco el uso de buenos aceites y grasas lubricantes.
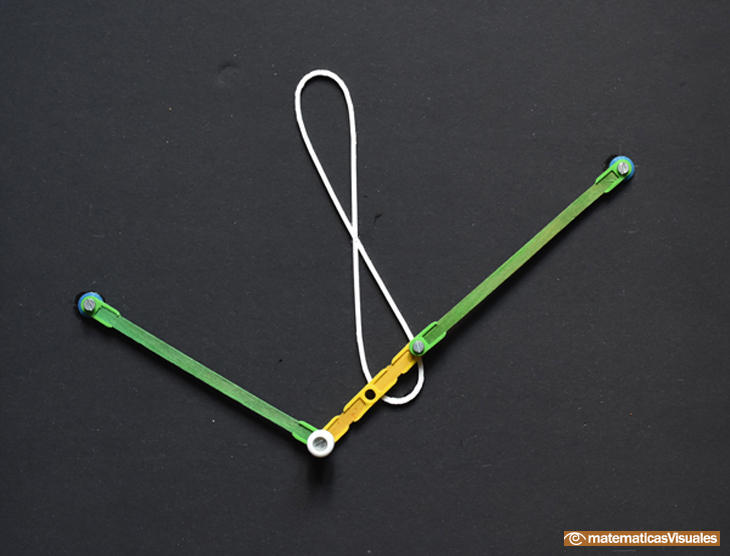
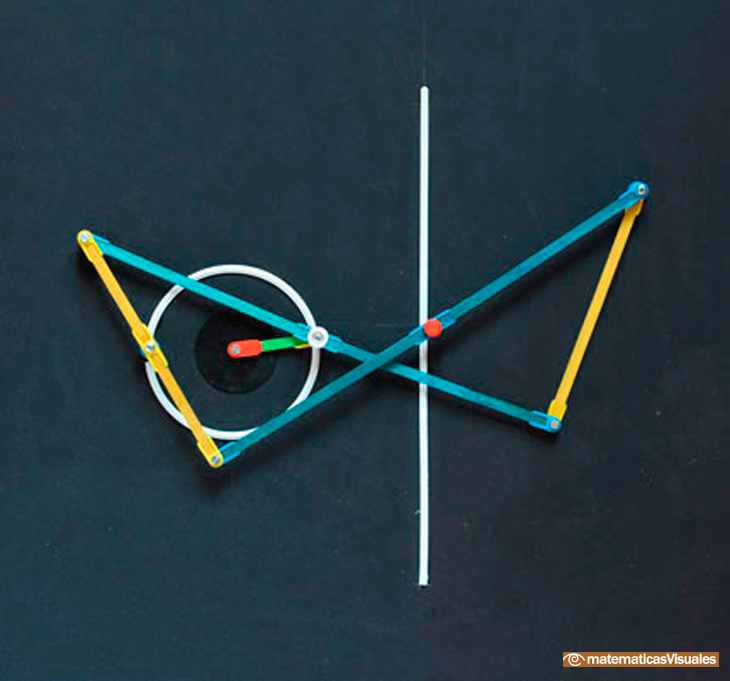
Watt inventó un mecanismo muy sencillo de 4 barras que resolvía el problema.
Ya hemos visto que en un mecanismo de 4 barras es habitual que una 'barra' esté determinada por dos puntos de otra parte de la máquina
a los que se unen dos barras que pueden girar. Ahora nos interesa la barra que une a estas dos para completar el mecanismo.
Y nos fijaremos en el punto medio de esa barra y en la figura que dibuja si movemos libremente las barras.
La curva es una especie de ocho. Es una lemniscata. Para unas determinadas proporciones de las longitudes de las barras se dibuja
una lemniscata de Bernouilli.
James Watt se fijó en que si se restringe el movimiento a una parte de la curva se obtiene un segmento recto casi perfecto,
suficientemente preciso para sus necesidades.
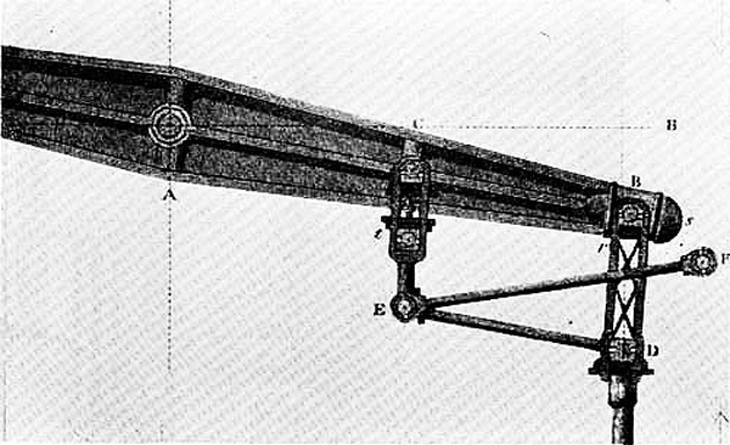
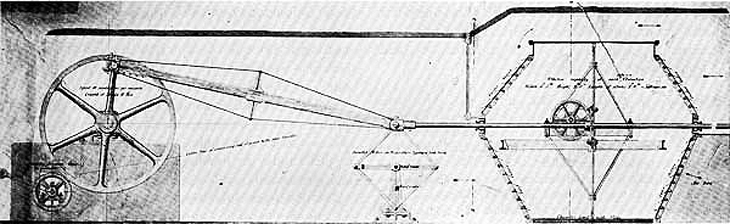
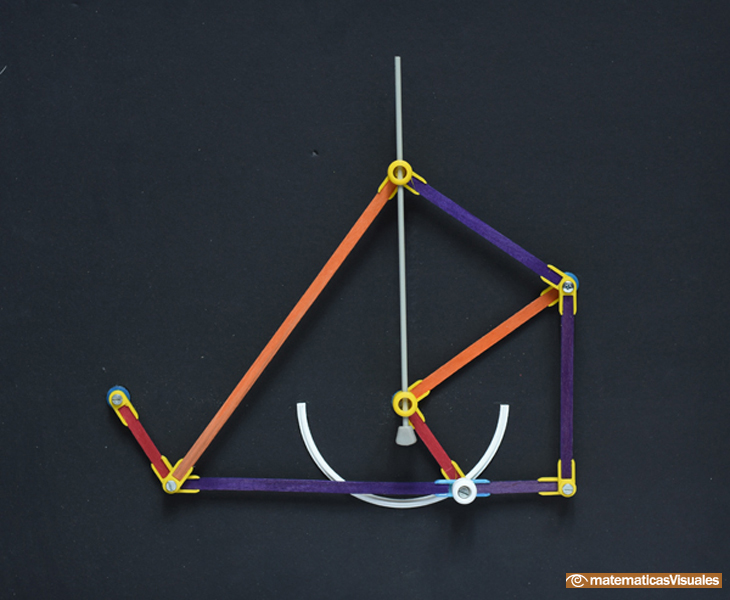
Watt necesitó ampliar ese movimiento para su máquina y añadió un paralelogramo, una idea semejante al pantógrafo (homotecia).
Éste es un esquema del mecanismo que se llamó Paralelogramo de Watt y que resolvía el problema.
En la siguiente ilustración vemos la aplicación del Paralelogramo de Watt en una máquina de vapor.
En máquinas más modernas también se usó el mecanismo más simple, sin paralelogramo.
7.- Movimiento circular y rectilíneo(II). Inversión
El problema de guiar el pistón de la máquina de vapor siguiendo una trayectoria rectilínea estaba ya resuelto por James Watt.
Su solución era genial, simple y satisfactoria. Pero no era perfectamente recta....
Varios matemáticos se plantearon este problema de cómo generar una recta. En particular de cómo transformar el moviento circular en
movimiento rectilíneo (o viceversa).
La primera solución fue aportada por Peaucellier y Lipkin, independientemente y casi a la vez (1864). Lipkin fue estudiante de
Chebyshev, del que luego hablaremos un poco.
El mecanismo de Peaucellier-Lipkin se basa en una trasformación especialmente bonita que se llama Inversión.
Se cuenta que cuando Sylvester le enseñó a Kelvin un modelo de este mecanismo se quedó fascinado.
Podríamos pensar que este mecanismo, por bonito que fuera, es más complicado que la solución de Watt pues tiene más barras y que
nunca fue usado en la práctica.
Sin embargo, no es así. En la Cámara de los Comunes en Londrés se utilizó una variante que parece que resultó bastante efectiva y silenciosa.
Otro mecanismo que también se basa en la inversión es el inventado por Hart.
Si nos fijamos, el mecanismo inversor de Hart usa un antiparalelogramo.
El siguiente mecanismo también transforma el movimiento circular en rectilíneo y fue inventado por Kempe.
8.- Movimiento circular y rectilíneo(III). Chebyshev
Pafnuty Chebyshev fue un matemático ruso del siglo XIX que hizo importantes contribuciones en muchos campos de las Matemáticas.
También se interesó por problemas de Mecánica.
Diseñó un mecanismo con 4 barras que describe una curva que en una parte es rectilínea casi perfecta.
Se puede hacer que este mecanismo transforme un movimiento circular en esa curva aunque ya no es tan simple.
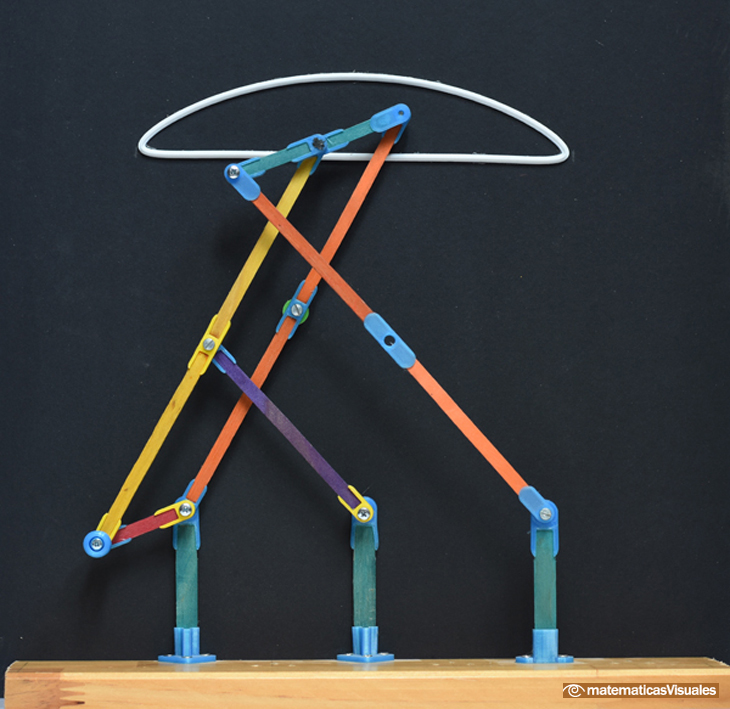
Entonces inventó un mecanismo distinto y sencillo que produce la misma curva. Es el que llamamos mecanismo Lambda de Chevyshev.
Por la forma que tiene la curva y si se combinan cuatro de estos mecanismos se puede hacer una máquina que se mueve
de modo que el cuerpo de la máquina se desplaza prácticamente paralela al suelo.
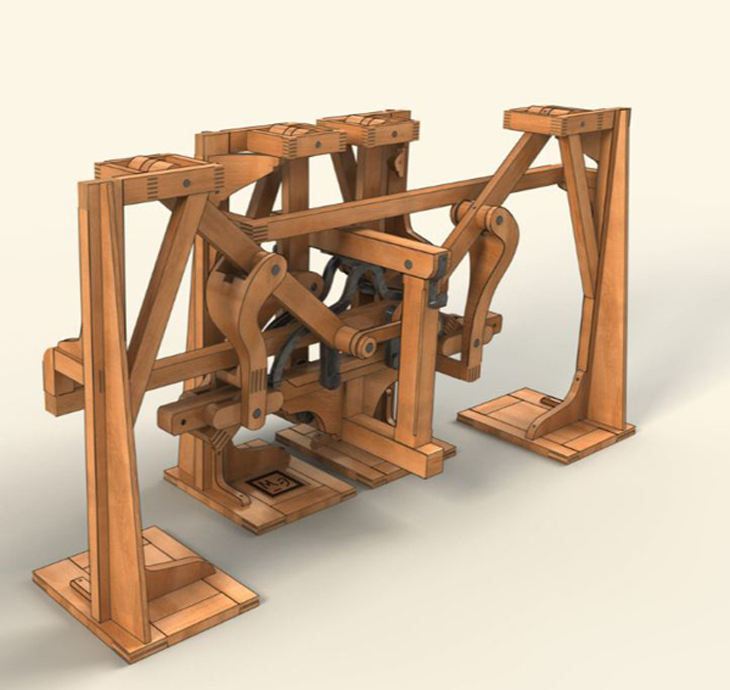
Esta máquina se construyó. Se llamó máquina Plantígrado y fue expuesta en la Exposición Universal de París en 1878. Un antecedente de
robots de cuatro patas.
Se podría considerar que este mecanismo es una 'rueda'. Se construyó una carretilla con este mecanismo en vez de rueda.
Hubo mucho interés en investigar cómo trazar otras curvas con este tipo de mecanismos articulados.
En particular las curvas cónicas. Estas curvas se generan como secciones de un cono por un plano: elipses, parábola e hipérbolas.
Aquí vemos una representación de una elipse (esferas de Dandelin).
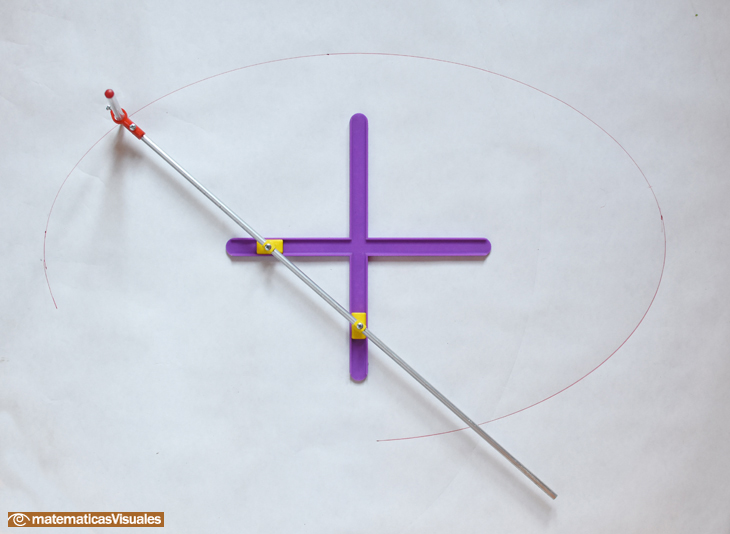
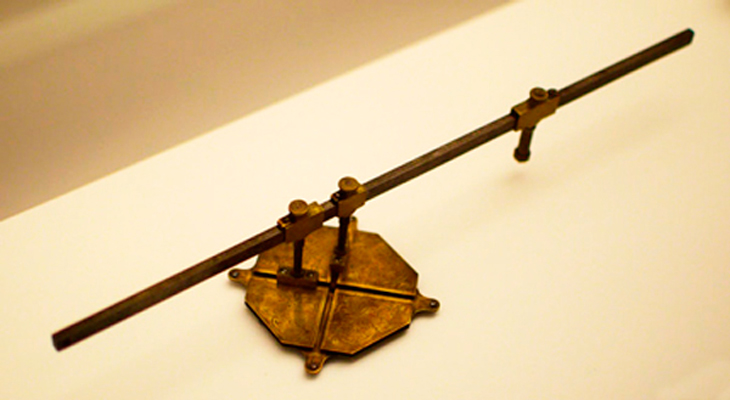
Las elipses se pueden dibujar con una barra que se desliza por dos guías. Este mecanismo se llama Elipsógrafo de Arquímedes
(aunque no queda claro si el gran genio de la Antigüedad tuvo algo que ver en su invención).
Este tipo de aparatos se utilizaron. Pude fotografiar este elipsógrafo en el Museo Naval en Madrid.
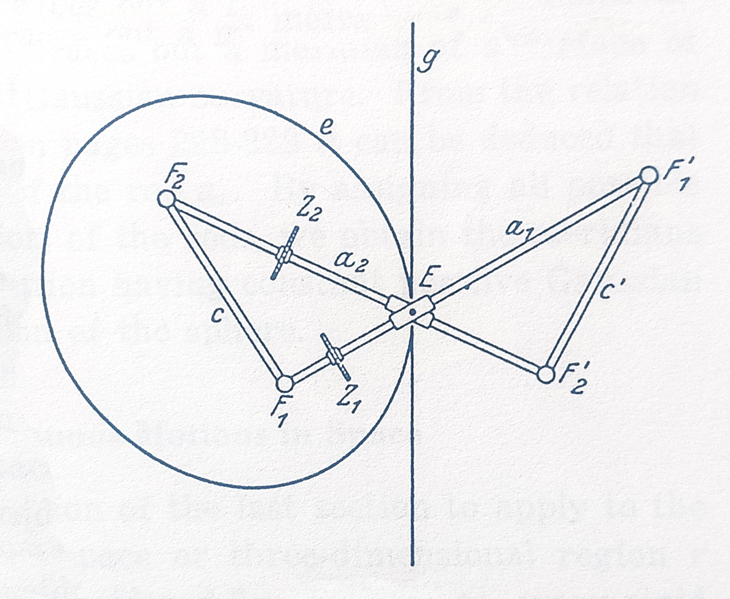
Una elipse tiene dos focos y la suma de las distancias de cualquier punto de la elipse a los dos focos es una constante.
Consideramos un antiparalelogramo y fijamos un lado corto, los dos extremos de ese lado van a ser los focos de una elipse.
El punto de intersección de los lados largos van a describir una elipse.
Esta imagen está en el libro 'Geometry and the Imagination' de Hilbert y Cohn-Vossen.
Transformando una circunferencia podemos obtener una elipse (como hizo Arquímedes para calcular su área). A partir de la ecuación de la circunferencia deducimos la de la elipse.
Exposición sobre los cinco sólidos platónicos: tetraedro, cubo, octaedro, icosaedro y dodecaedro. Construcción de los poliedros encajados. El Omnipoliedro. Algunas propiedades básicas que se pueden aprender de esta construcción.
En su libro 'Sobre Conoides y Esferoides', Arquímedes calculó el área de la elipse. Es un ejemplo de demostración rigurosa por doble reducción al absurdo.
La sección de un cilindro por un plano que corta al eje del cilindro en un punto es una elipse. Probamos este resultado usando las esferas de Dandelin.
Durero nos mostró un método excelente para dibujar elipses pero cometió un pequeño error. La intuición parece decirnos que la sección de un cono tiene forma de huevo. Podemos probar, usando conceptos básicos, que la elipse tiene dos ejes de simetría.
La sección de un cilindro por un plano es una elipse. Estas figuras se llaman segmentos cilíndricos o cilindros truncados y pueden desarrollarse en el plano.
Con motivo del Día internacional de las Matemáticas 2020, que se celebra el 14 de Abril, hemos preparado una exposición homenaje a Kepler en relación con el dodecaedro rómbico.
Material para la sesión sobre construcción de poliedros que se realizó en Zaragoza el 13 de Abril de 2012. El objetivo es disfrutar haciendo poliedros y obtener alguna conclusión matemática a partir de esas construcciones.
Material para la sesión sobre poliedros (Zaragoza el 7 de Noviembre de 2014). Estudiaremos el volumen del octaedro y del tetraedro y veremos que el octaedro truncado nos puede ayudar en esta tarea. Construimos una cubo de cartulina con un tetraedro de origami modular en su interior.
Material para la sesión del TTM (Zaragoza el 23 de Octubre de 2015) . Estudiamos la dualidad de poliedros y, en particular, los poliedros platónicos duales. Construimos una cubo de cartulina con un octaedro de origami modular.
Material para la sesión del TTM (Zaragoza, el 20 de Octubre de 2017). El objetivo principal es disfrutar con las Matemáticas y fomentar la construcción de poliedros por su valor estético y también porque nos facilitan la comprensión de resultados matemáticos.
Material para la sesión del TTM (Zaragoza, el 19 de Octubre de 2018). Diferentes construcciones del icosaedro nos ayudan a comprender sus propiedades. El objetivo principal es disfrutan construyendo poliedros.
Material para la sesión del TTM (Zaragoza, el 18 de Octubre de 2019). El objetivo principal es disfrutan construyendo poliedros, en esta ocasión construiremos una cajita que es un dodecaedro rómbico. Estudiaremos la relación de este poliedro con el cubo, el octaedro y el cuboctaedro.






















 SIGUIENTE
SIGUIENTE

 ANTERIOR
ANTERIOR




















